

代码拉取完成,页面将自动刷新
主要完成部分pid_controller.cpp
主要完成部分stanley_control.cpp
核心思想:获取轨迹点和车的当前位置,计算距离车最近的点,用于计算横向和航向误差,找到课程中所学习的几何关系,得到横向的误差 e 和航向误差 e_theta ,在根据横向误差得到对应的角度,两个角度之和就是方向盘控制的角度了。
主要完成部分lqr_controller.cpp

这里分matrix_a和 matrix_a_coeff是因为在后续离散的步骤方便。


ComputeLateralErrors函数如上,因为描述系统状态是通过误差的方式,所以选用横向误差和航向误差以及他们的变化率为状态变量。

这里采用双线性变换发进行离散处理:
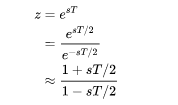

这里主要是根据lqr公式计算Algebraic Riccati equation公式,求得最佳的P值后,带入得到K。


主要完成部分frenet_optimal_trajectory.cpp
分别在横向和纵向构建多项式拟合曲线
横向采样:
构建五次多项式 因为已知起点和终点的p、v、a,因为巡航过程,希望横向的速度和加速度均为0.
通过构建的多项式,计算在每个离散时间下的p v a jerk

纵向采样:
构建四次多项式,因为巡航在s坐标下我们不设定终点

计算每个路径的代价:
得到采样的轨迹后,对每个轨迹进行代价的计算,最后选择代价最小的作为规划轨迹
根据参考论文,
横向轨迹评价函数如下:
其中:,即jerk在采样时间内的变化幅度,用来评价舒适性;
表示目标状态偏离中心线的指标;
为车辆行驶效率评价指标。
纵向轨迹评价函数如下:
与横向评价函数唯一不同的是代表目标配置速度与设定期望速度的差距损失。
最后将二者进行合并,加入权重系数,即可得到最优路径评价函数:
通常轨迹评价函数越小,代表该轨迹的代价越小,优先度越高。



遍历采样的路径,经过第二步计算出其最大速度、最大加速度、最大曲率,这些路径可能代价很小,但不安全,所以应该剔除

下图来自网络


在lattice planner中,对路径提出了6个代价,
纵向上:
目标cost:即保证纵向上速度越接近给定的值,cost越小,行驶距离越远,cost越小
舒适cost:舒适度与jerk息息相关,2为jerk的边界值,当jerk>2,则jerk/2 >1,(jerk/2)^2更大,以此来表示加速度的cost
碰撞cost:这里我们直接在第三步,当轨迹有障碍物时,直接踢出了,并没有作为一个cost
向心加速度cost:根据曲率而来
横向上:
偏移cost:当与起点的lat正向时,权重为1,否则权重为10,通过这样,横向上便宜较小的cost低
舒适型cost:公式为l‘’ * (s_dot)^2 + l' * s_dotdot 可以理解为当横向加速度较大的时候纵向速度应该小一点,当纵向加速度较大的时候,横向速度应该小一点。
//目标cost
double LonObjectiveCost(const FrenetPath &fp)
{
double dist_s =
fp.s.back() - fp.s.front();
double speed_cost_sqr_sum = 0.0;
double speed_cost_weight_sum = 0.0;
for (size_t i = 0; i < fp.s.size(); ++i) {
double cost = fp.s_d[i] - TARGET_SPEED;
speed_cost_sqr_sum += fp.t[i] * fp.t[i] * std::fabs(cost);
speed_cost_weight_sum += fp.t[i] * fp.t[i];
}
//关于速度的代价 速度越接近目标值,cost越小,t^2放大这一误差
double speed_cost =
speed_cost_sqr_sum / (speed_cost_weight_sum + 1e-6);
//关于距离的代价
double dist_travelled_cost = 1.0 / (1.0 + dist_s);
return (speed_cost * FLAGS_weight_target_speed +
dist_travelled_cost * FLAGS_weight_dist_travelled) /
(FLAGS_weight_target_speed + FLAGS_weight_dist_travelled);
}
//纵向舒适型cost
double LonComfortCost(const FrenetPath& fp)
{
double cost_sqr_sum = 0.0;
double cost_abs_sum = 0.0;
for (size_t i = 0; i < fp.s.size();++i)
{
double jerk = fp.s_ddd[i];
//舒适度关于到jerk
double cost = jerk / FLAGS_longitudinal_jerk_upper_bound;
cost_sqr_sum += cost * cost;
cost_abs_sum += std::fabs(cost);
}
return cost_sqr_sum / (cost_abs_sum + 1e-6);
}
//向心加速度
double CentripetalAccelerationCost(const FrenetPath& fp)
{
// Assumes the vehicle is not obviously deviate from the reference line.
double centripetal_acc_sum = 0.0;
double centripetal_acc_sqr_sum = 0.0;
for(size_t i = 0; i < fp.s.size();++i)
{
double s = fp.s[i];
double v = fp.s_d[i];
double centripetal_acc = v * v * fp.c[i];
centripetal_acc_sum += std::fabs(centripetal_acc);
centripetal_acc_sqr_sum += centripetal_acc * centripetal_acc;
}
return centripetal_acc_sqr_sum /
(centripetal_acc_sum + FLAGS_numerical_epsilon);
}
//横向偏移代价
double LatOffsetCost(const FrenetPath& fp)
{
double lat_offset_start = fp.d[0];
double cost_sqr_sum = 0.0;
double cost_abs_sum = 0.0;
for (size_t i = 0; i < fp.s.size(); ++i)
{
double lat_offset = fp.d[i];
double cost = lat_offset / FLAGS_lat_offset_bound;
if (lat_offset * lat_offset_start < 0.0) //方向相反
{
cost_sqr_sum += cost * cost * FLAGS_weight_opposite_side_offset;
cost_abs_sum += std::fabs(cost) * FLAGS_weight_opposite_side_offset;
} else {
cost_sqr_sum += cost * cost * FLAGS_weight_same_side_offset;
cost_abs_sum += std::fabs(cost) * FLAGS_weight_same_side_offset;
}
}
return cost_sqr_sum / (cost_abs_sum + 1e-6);
}
//横向舒适cost
double LatComfortCost(const FrenetPath& fp)
{
double max_cost = 0.0;
for (size_t i = 0; i < fp.s.size(); ++i)
{
double s = fp.s[i];
double s_dot = fp.s_d[i];
double s_dotdot = fp.s_dd[i];
double d = fp.d[i];
double d_dot = fp.d_d[i];
double d_dotdot = fp.d_dd[i];
double cost = d_dotdot * s_dot * s_dot + d_dot * s_dotdot;
max_cost = std::max(max_cost, std::fabs(cost));
}
return max_cost;
}
此处可能存在不合适展示的内容,页面不予展示。您可通过相关编辑功能自查并修改。
如您确认内容无涉及 不当用语 / 纯广告导流 / 暴力 / 低俗色情 / 侵权 / 盗版 / 虚假 / 无价值内容或违法国家有关法律法规的内容,可点击提交进行申诉,我们将尽快为您处理。





